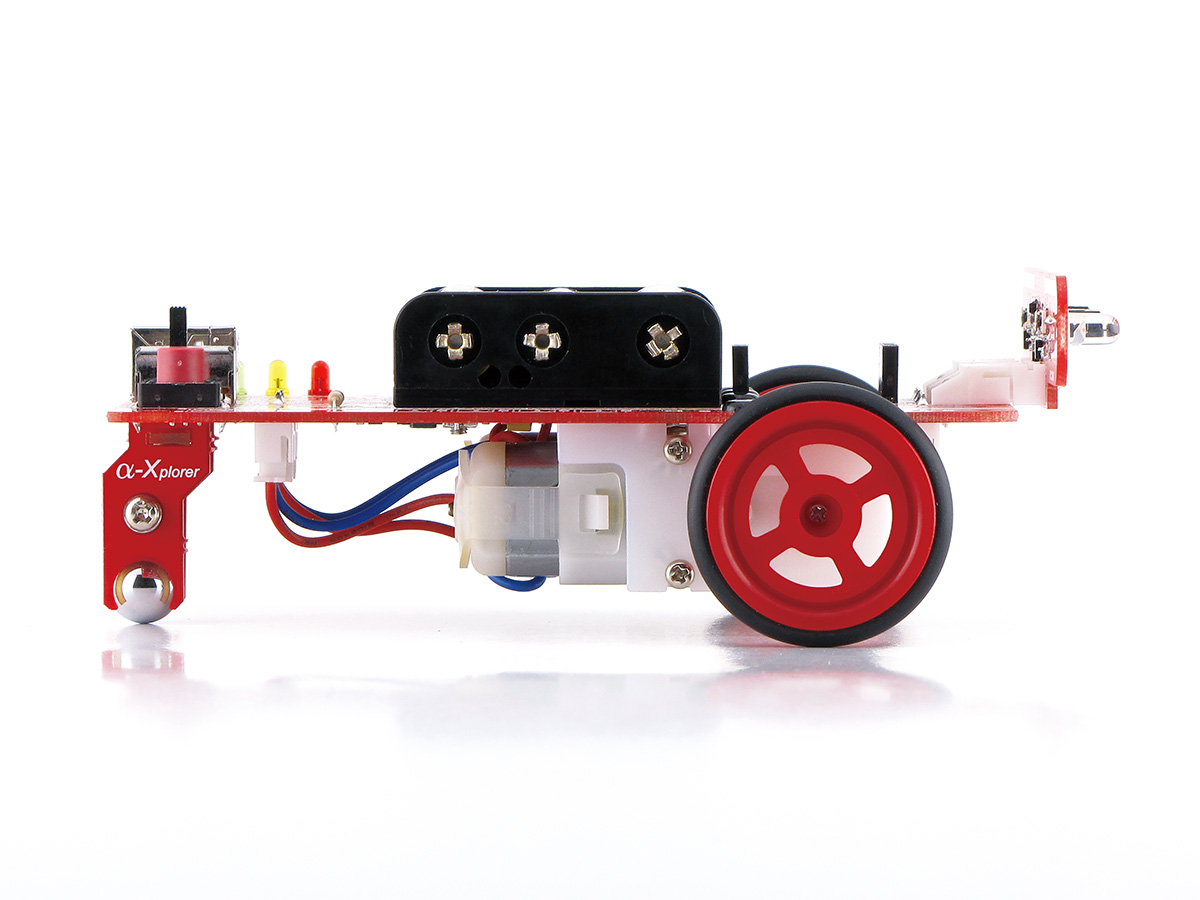
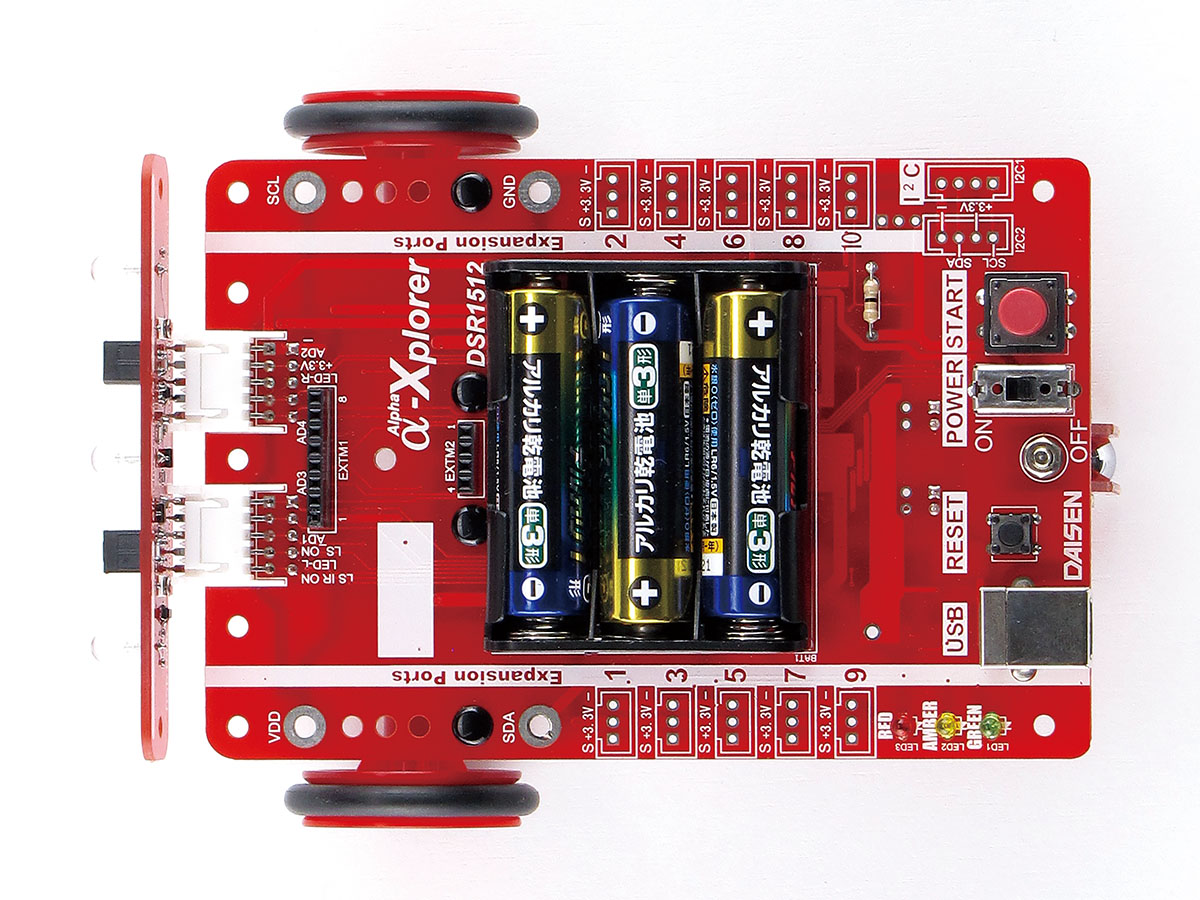
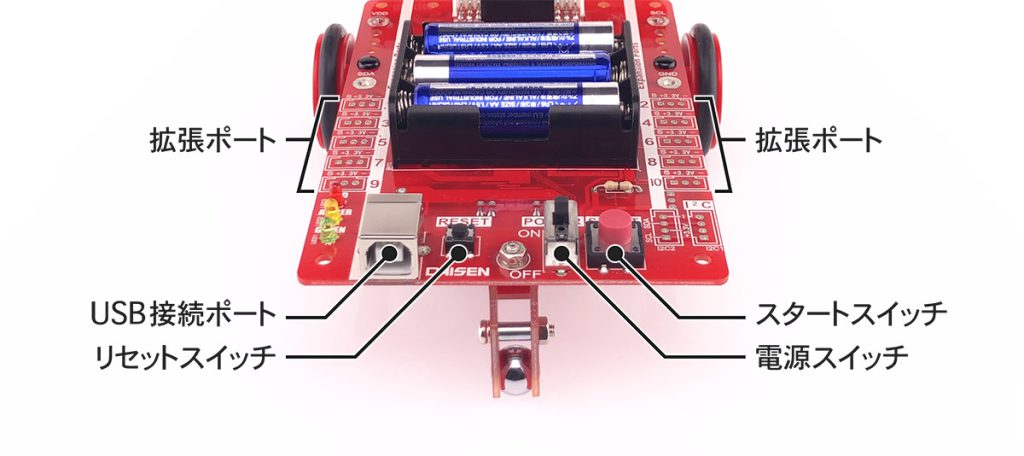
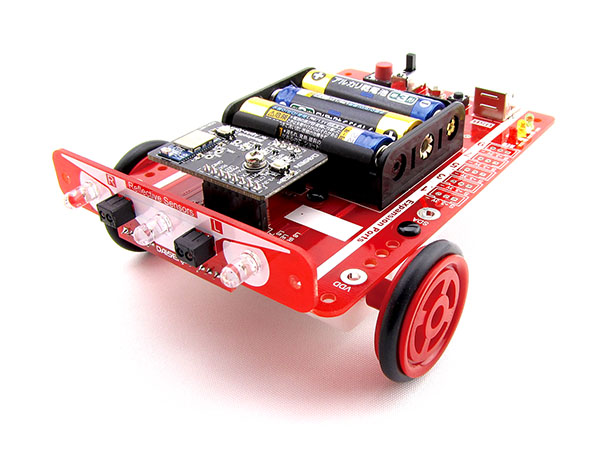
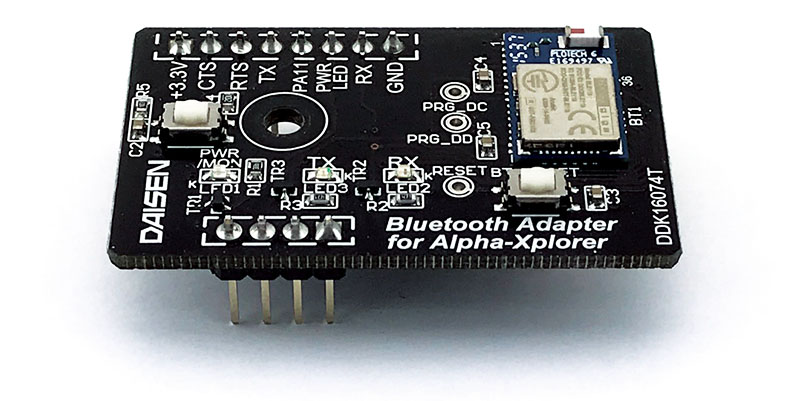
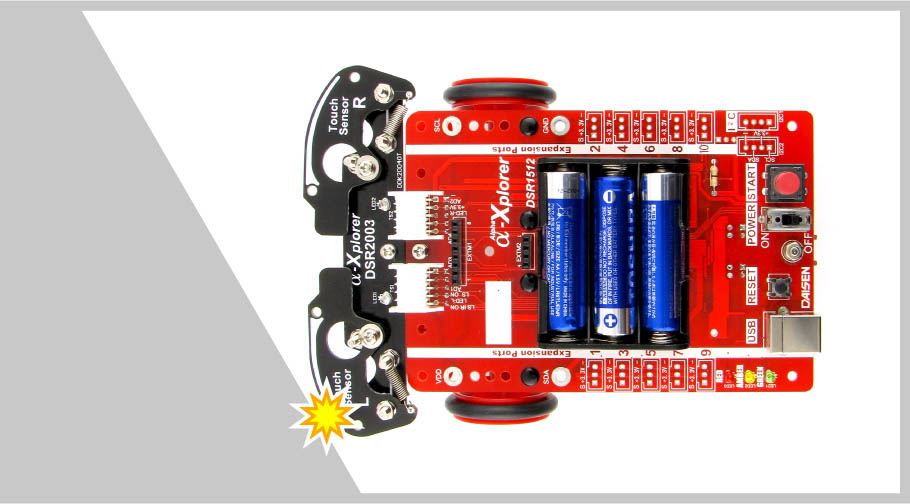
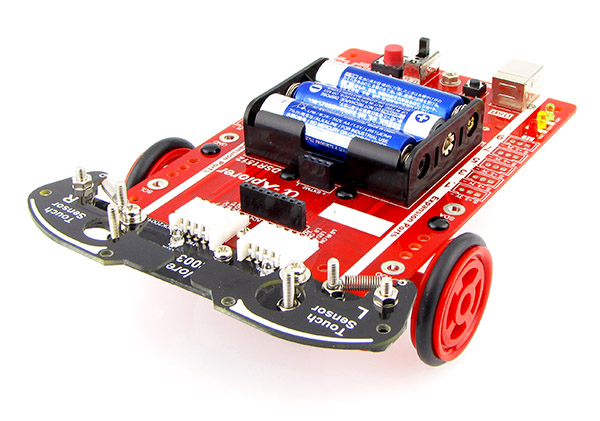
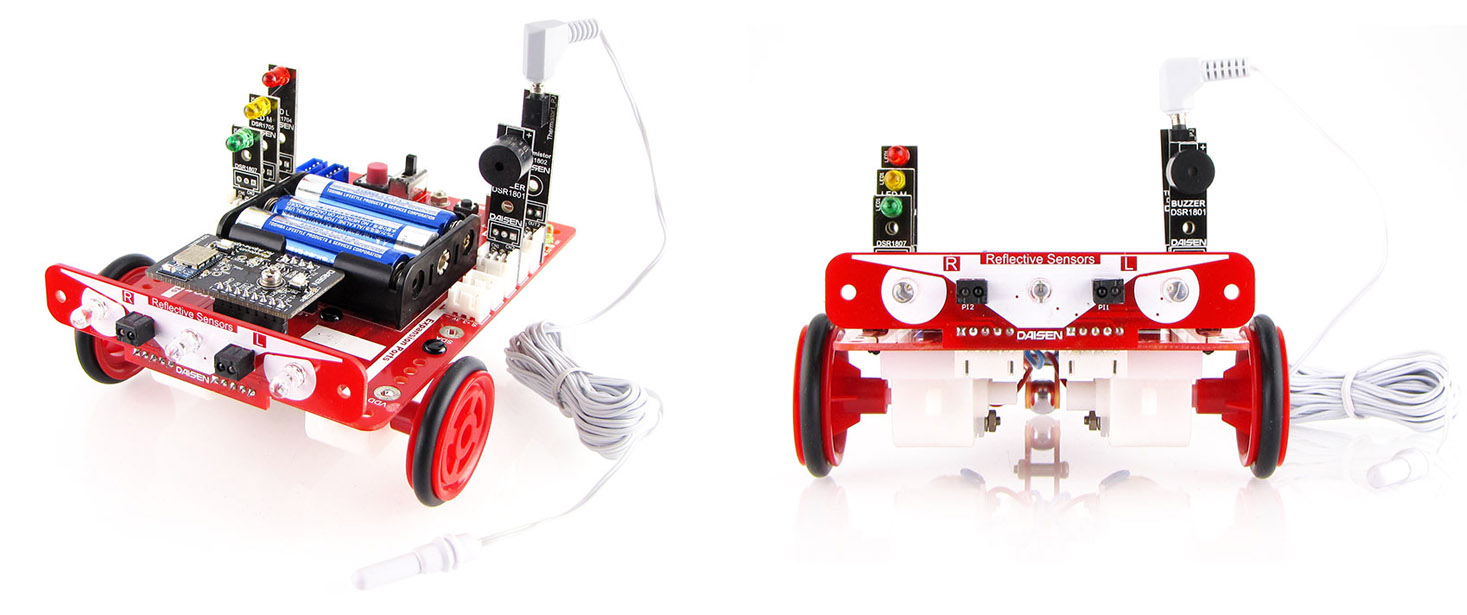
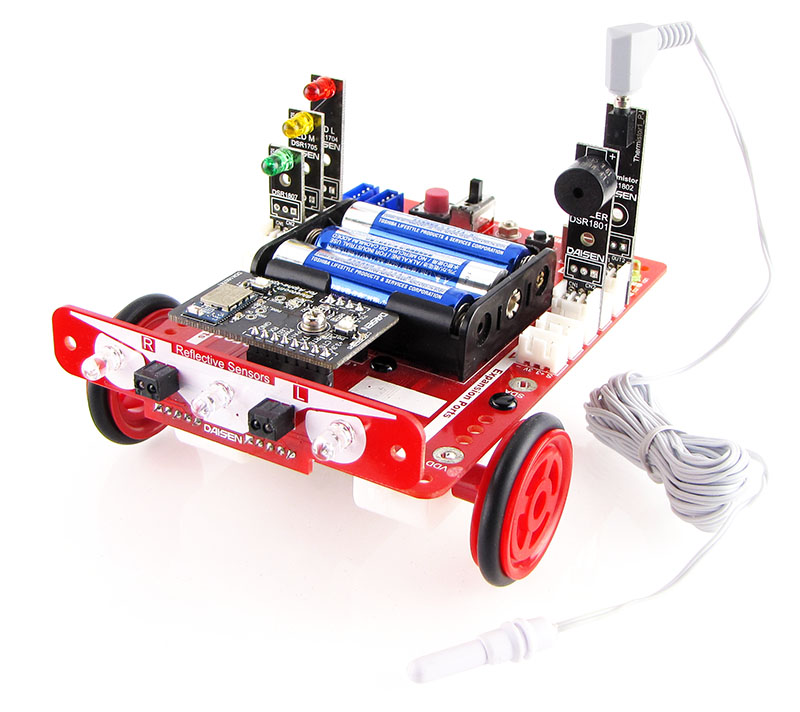
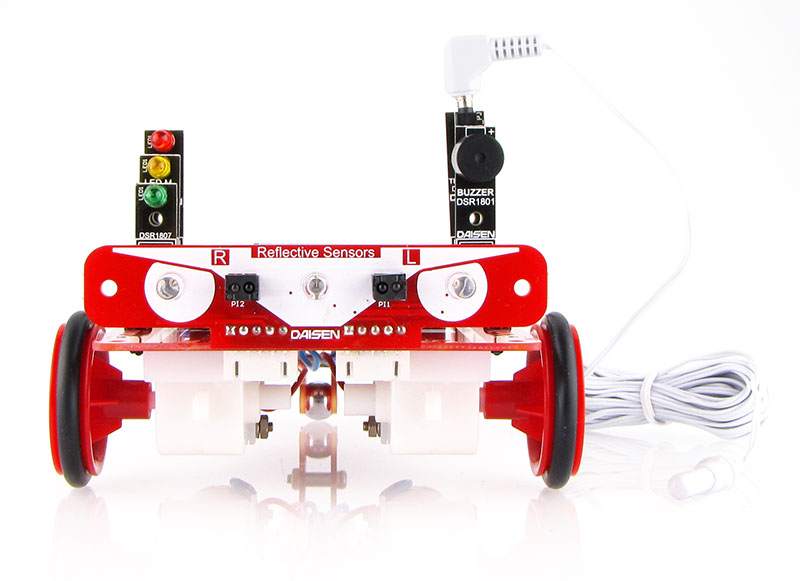
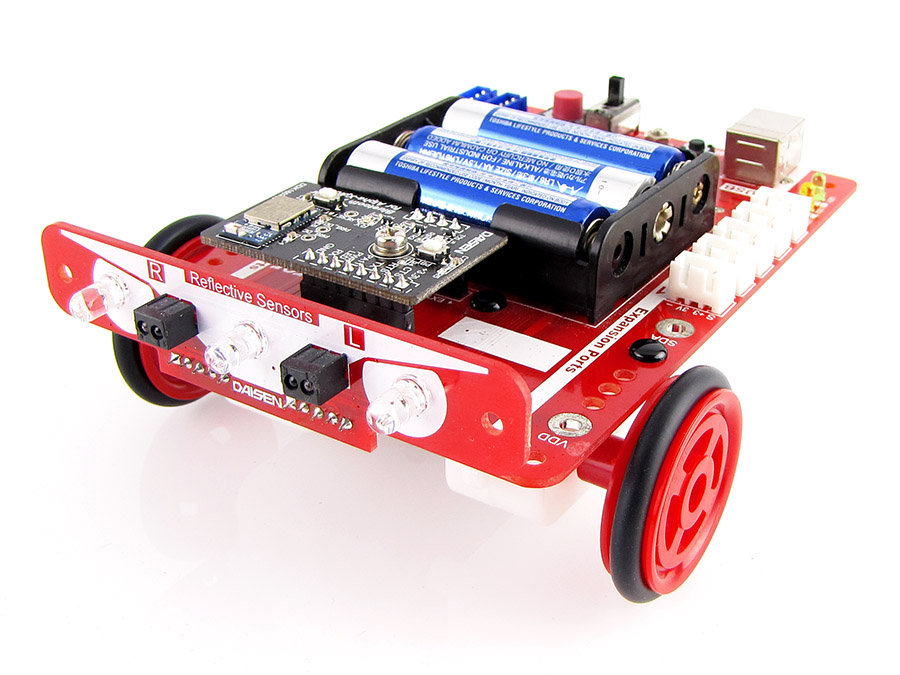
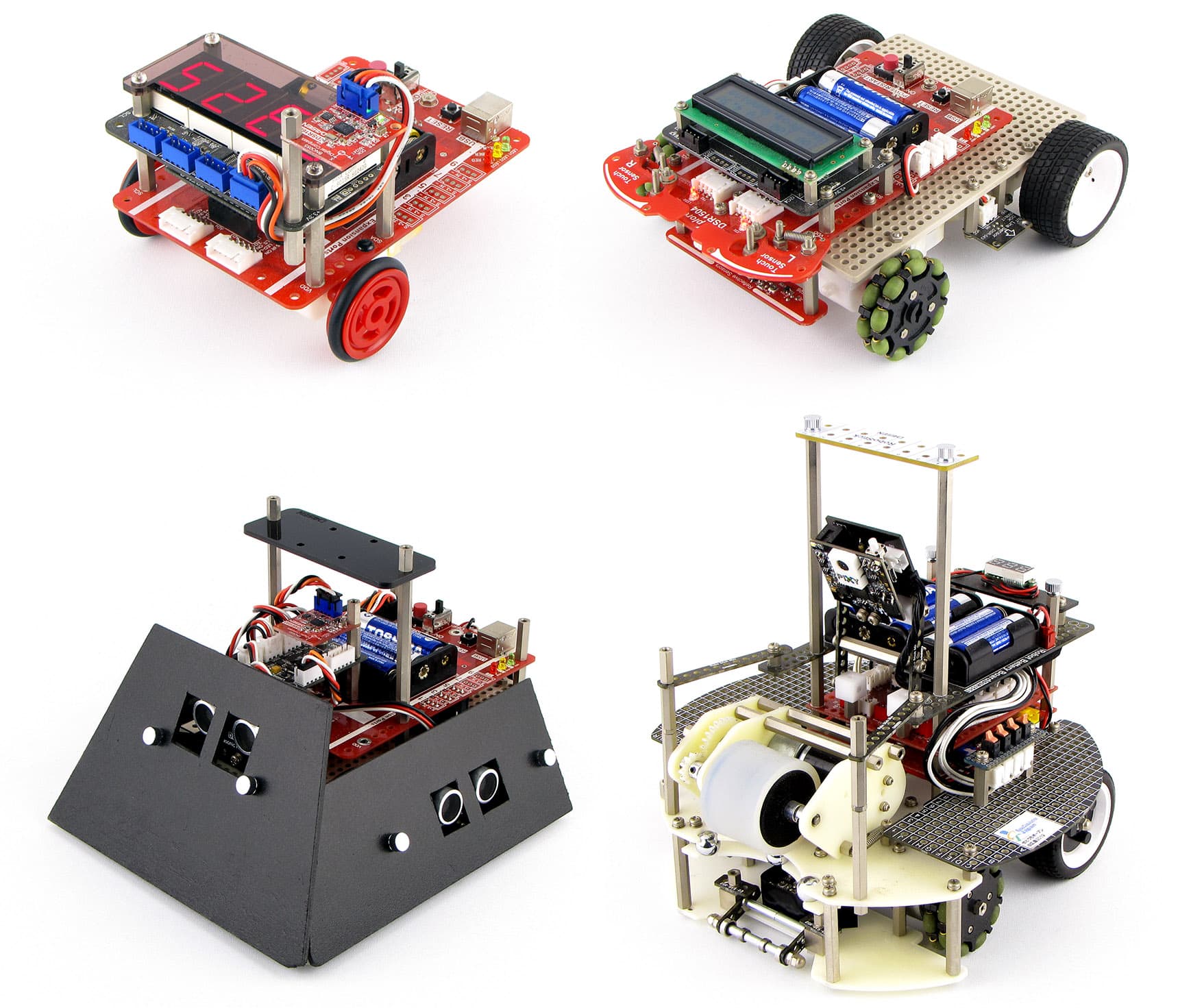
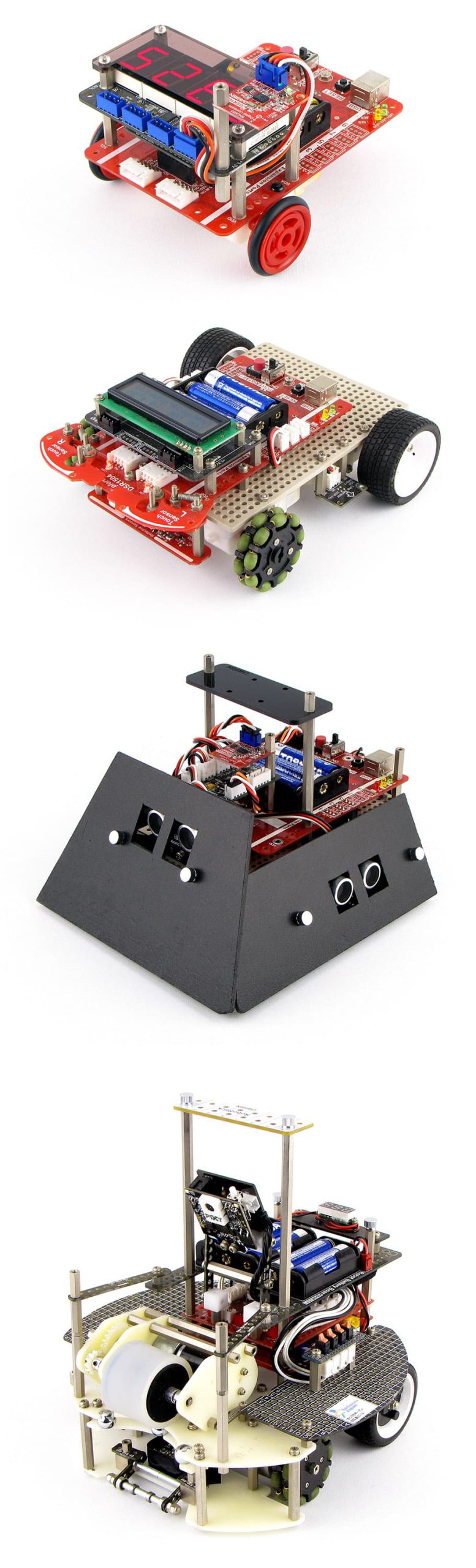
『α-Xplorer』は単三乾電池3本で駆動するロボットです。電池残量が少なくなってくると、モーターの回転速度の低下やBluetooth通信が不安定になる場合があり、これらの現象を回避するために早めの電池交換が必要です。
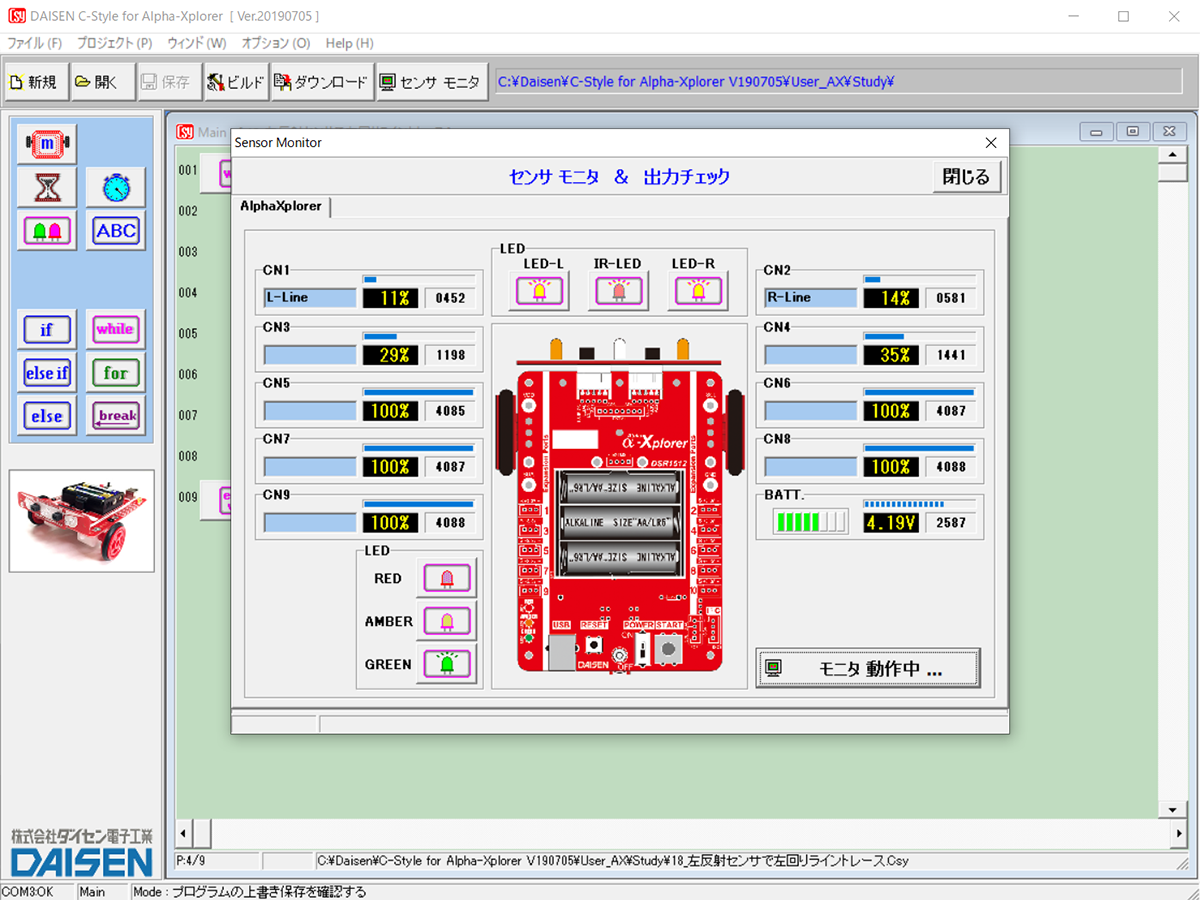
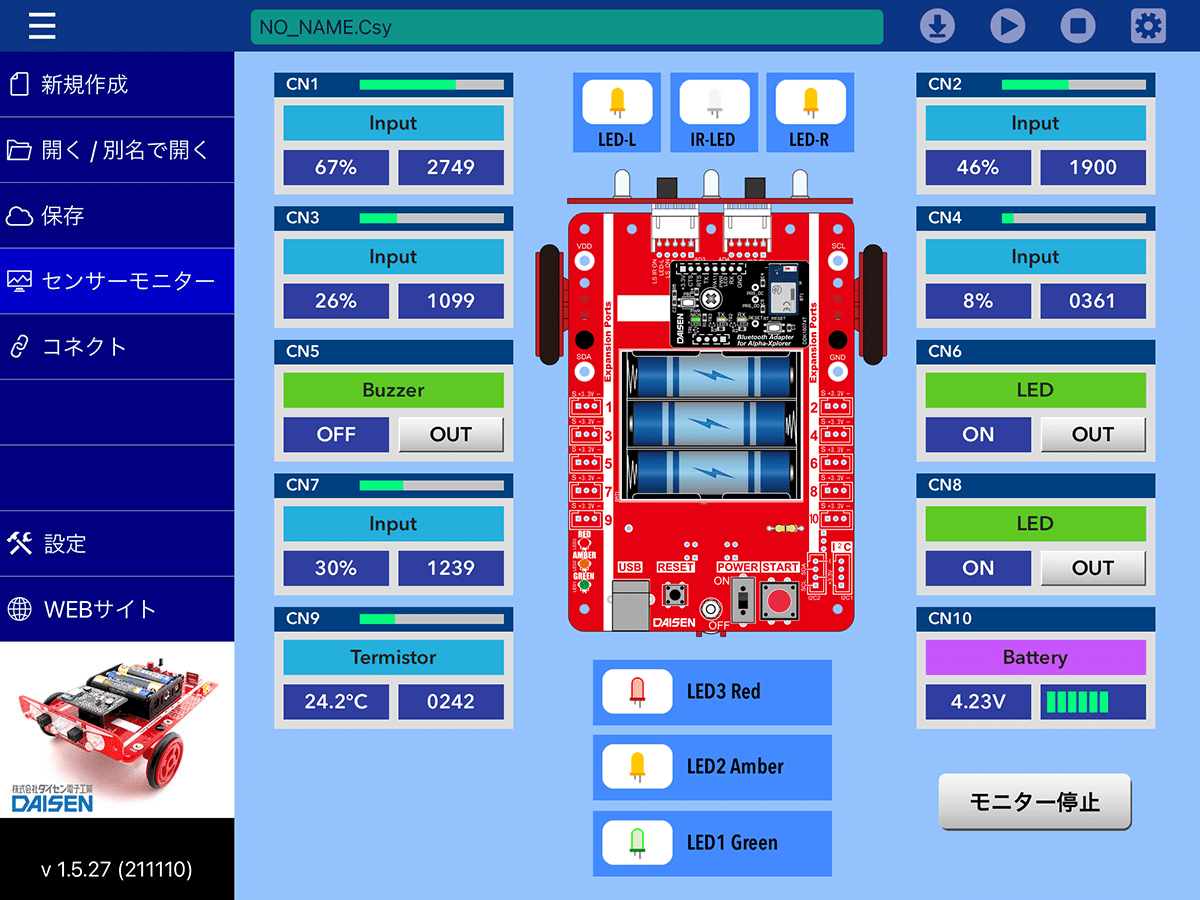
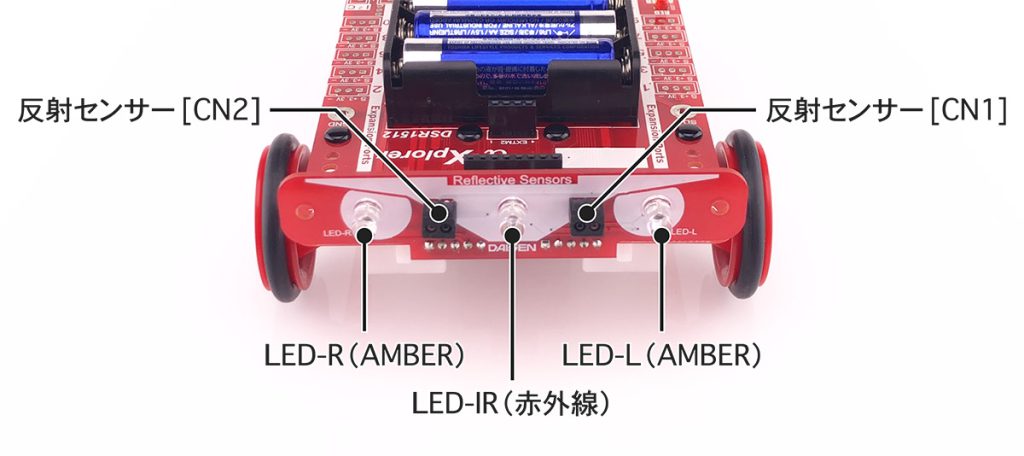
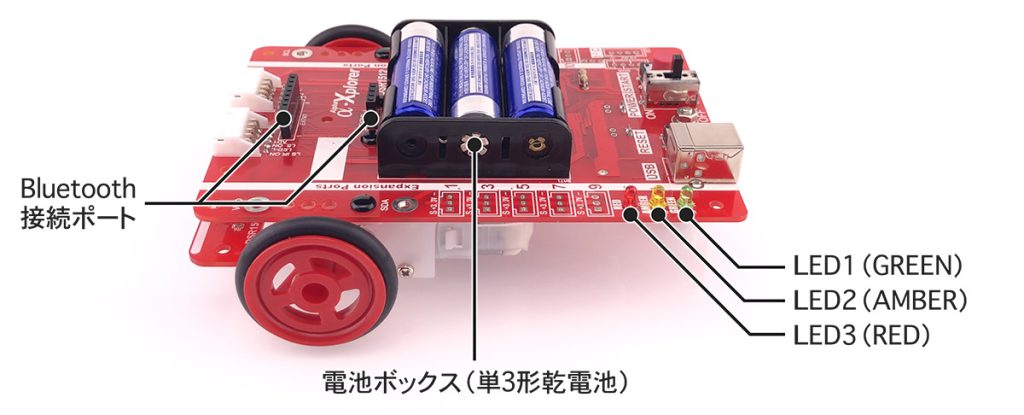
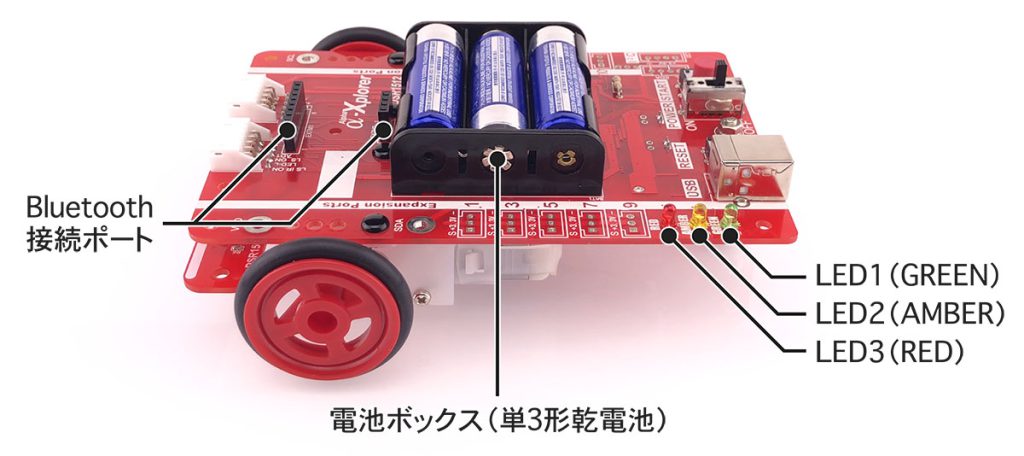
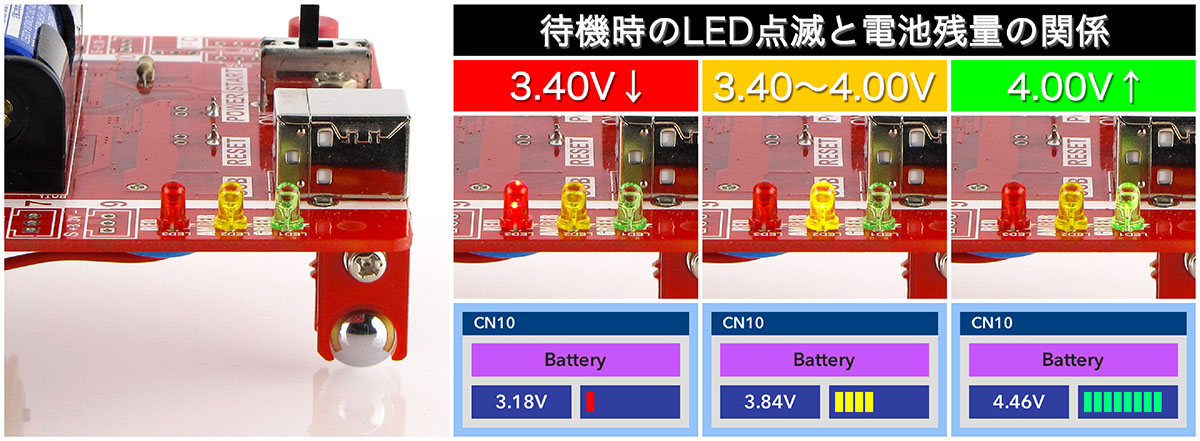
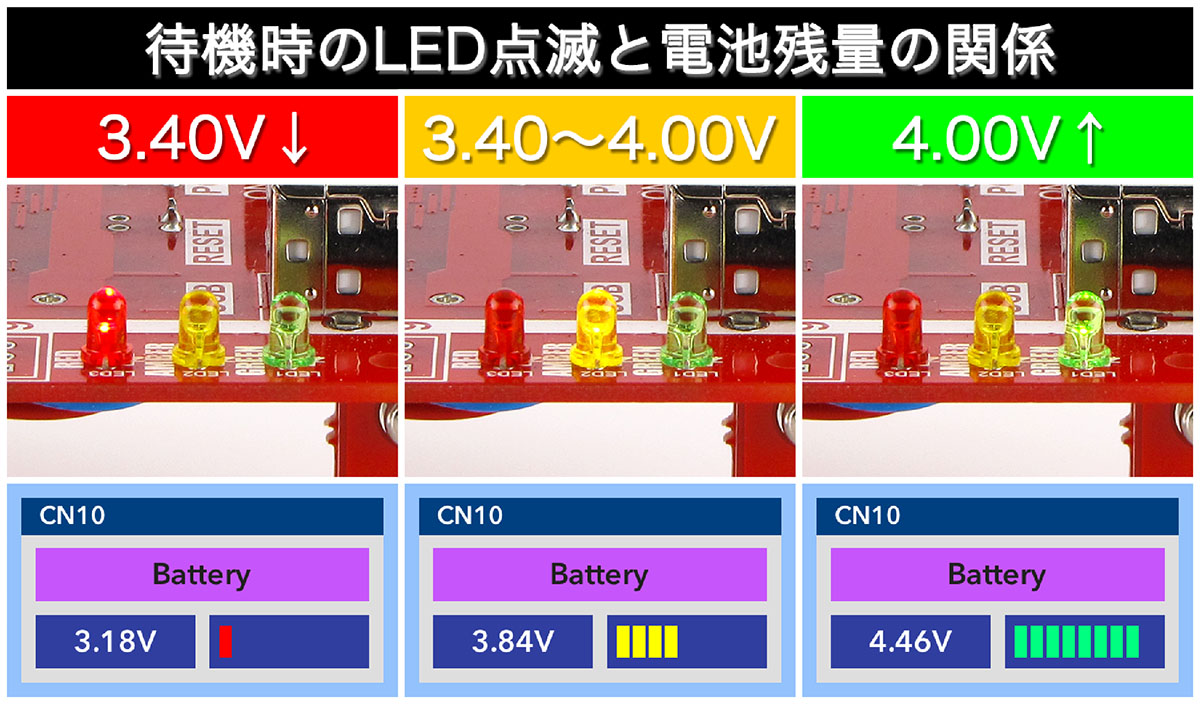
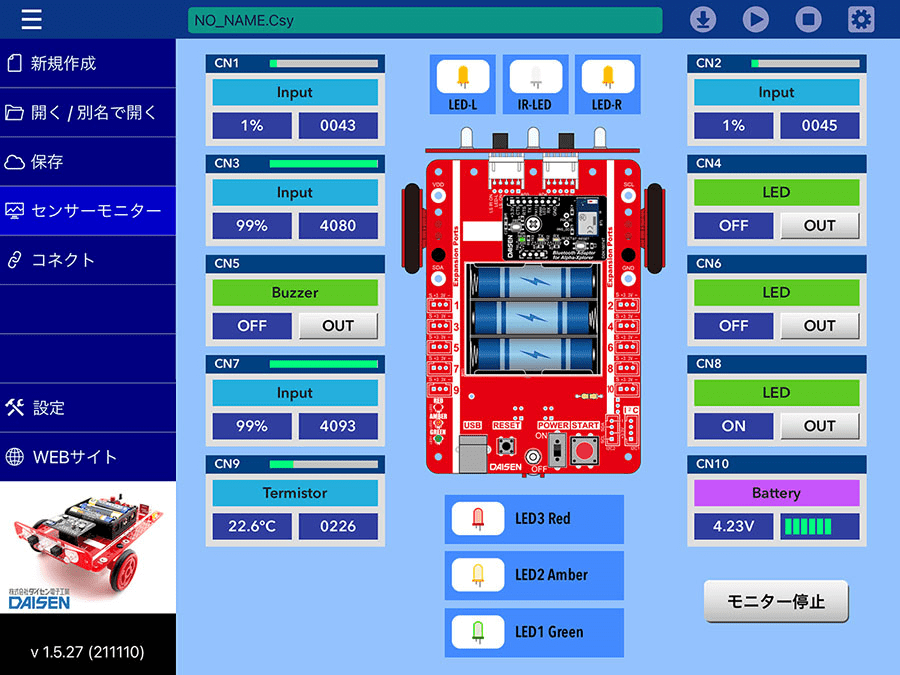
標準搭載の3色のLEDに電池残量を示す機能が備わっています。電源をONにした待機時に点滅しているLEDが、緑色の場合は電池残量が4.00V以上、橙色の場合は3.40〜4.00V、赤色の場合は3.40V以下を示しています。また『C-Style』のセンサーモニターでも電池残量のモニタリングが可能で、こちらは残量を数値で確認することができます。
※ ロボットの正常な動作を安定して得られるよう、電池残量4V以上での使用を推奨しています。電池交換の目安にしてください。